By Alan Friedman
This is Part 1 of our three-part series on linear and non-linear systems in machinery. In this first instalment, we’ll introduce the basic concepts and explain why they matter for understanding vibration analysis.
This series is meant to introduce readers to the concepts of linear and non-linear systems in the context of machinery vibration analysis by describing their relationship to machine health. When you analyze the vibration spectrum of a machine in the context of linearity and non-linearity, you can arrive at a better understanding of why spectra look the way they do and how their appearance relates to machine condition. The explanations are written in simple language so they can be understood even by those without technical backgrounds.
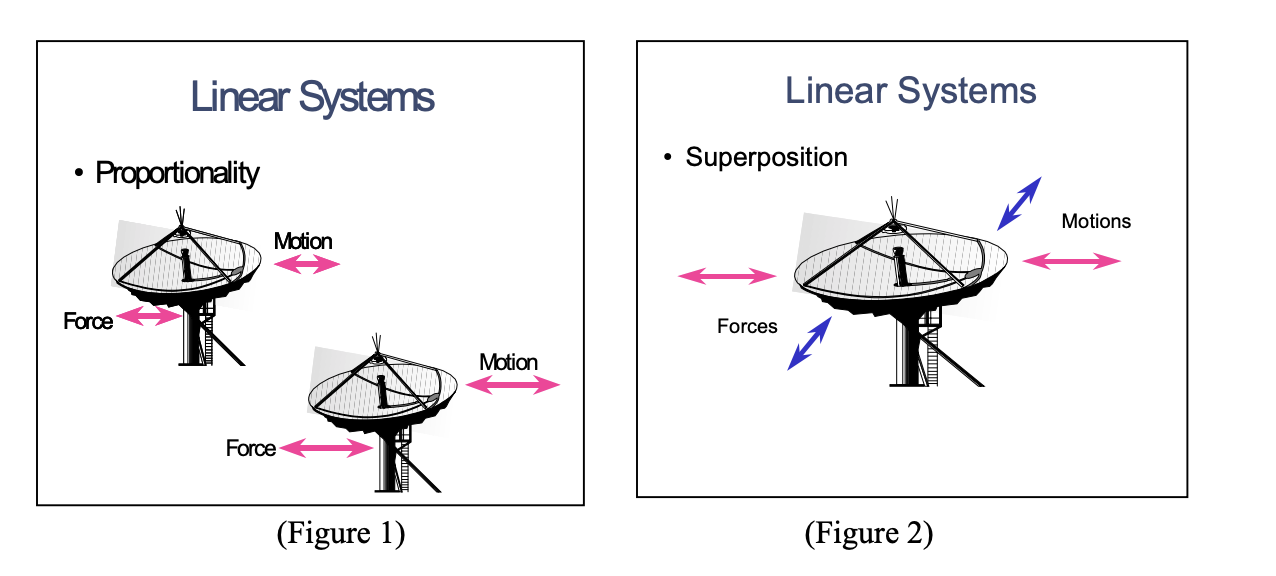
Linear Systems
If one considers a linear system a black box, one can say that what comes out of the box is directly proportional to what goes in. This is coincidentally called “proportionality” and is described in Figure 1 above. Here we can see that the output motion is directly related to the input force. If the input force increases, the resulting motion also increases proportionally.
“Superposition” is another quality of linear systems as demonstrated in Figure 2 above. Superposition means that if we have 2 or more input forces, the output motion will be proportional to the sum of the input forces. In other words, nothing new is created. If we add a whole bunch of forces at the input, the output motion will still be directly proportional to the sum of those forces.
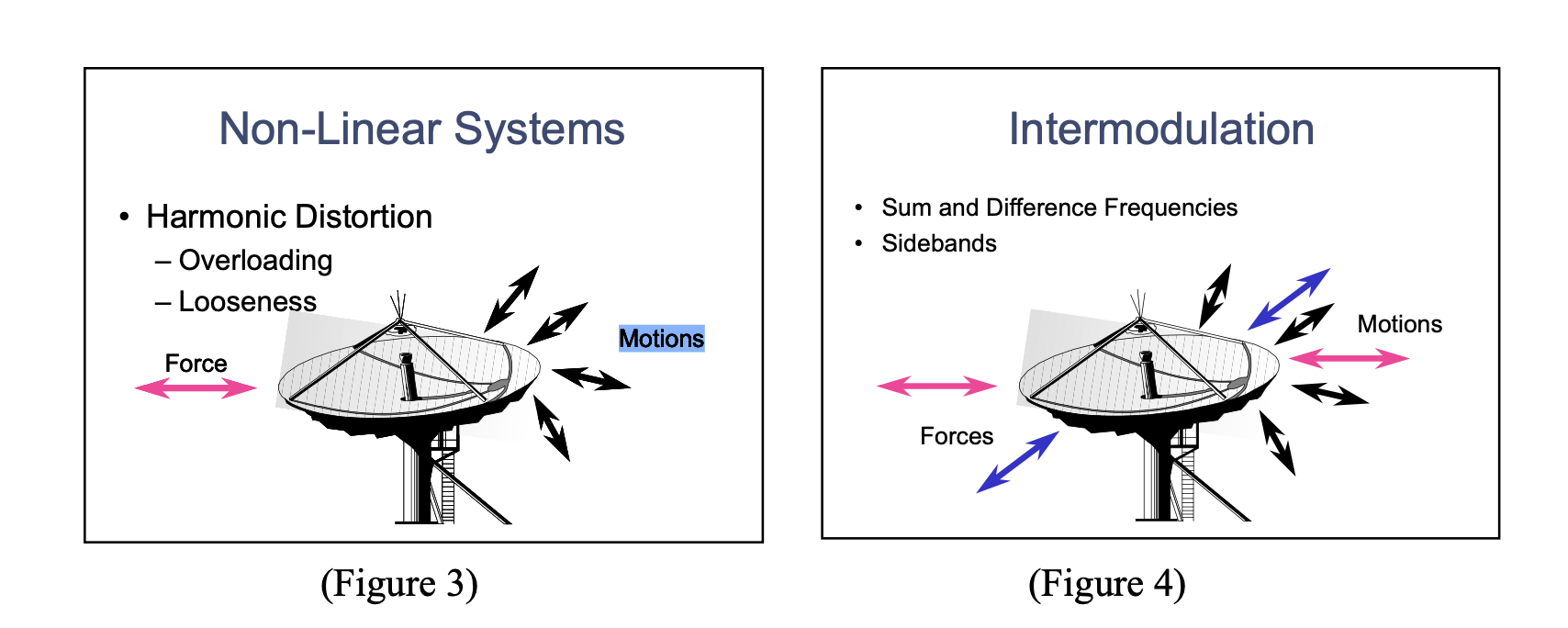
Non-Linear Systems
Consider a dense metal cube sitting on some ice. If you push the cube, it will slide proportionally to how hard you push it. This is a linear response. Now consider that the cube is made out of gelatin. When you give the gelatin a push it may slide a bit, but it will also wiggle and wobble all over the place. This is an example of a non-linear response. The gelatin doesn’t move only in the direction of the push, it also wiggles around in a whole bunch of different directions. Therefore we can say that the output motion is not directly proportional to the input force and therefore the gelatin block is non-linear. Figure 3 above demonstrates this principal.
Non-Linear systems also don’t follow the law of Superposition. This means that the output response is not proportional to the sum of the input forces. In a non-linear system, the inputs combine with each other and produce new things in the output that were not present in the input. (Figure 4)
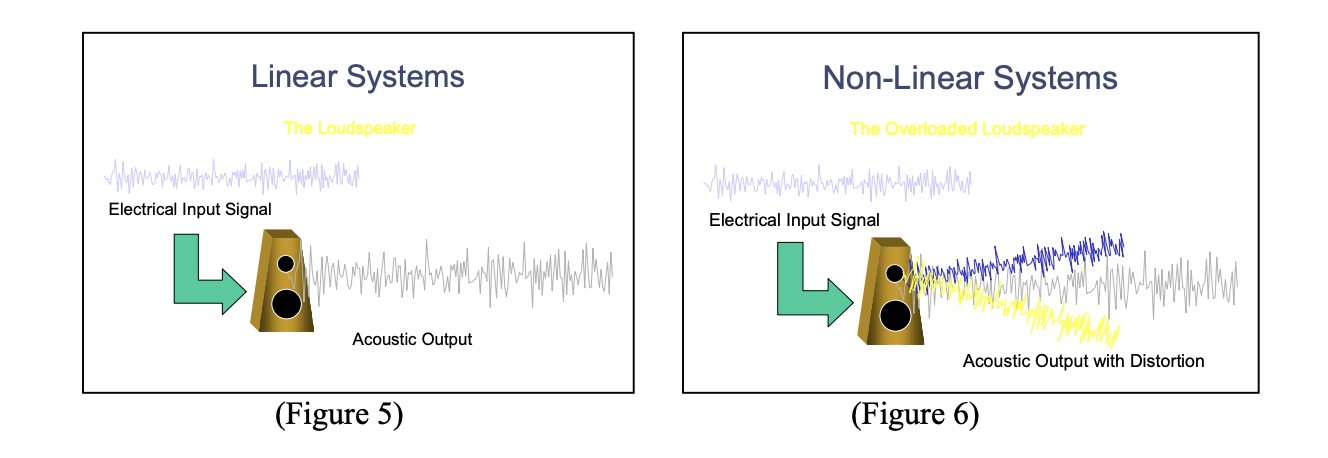
Here is another example of linear and non-linear systems that should be easy to relate to. The example is demonstrated by figures 5 and 6. When one plays a stereo at a relatively low volume, the music comes out clearly. If one raises the volume slightly, the music comes out of the speaker more loudly, but still sounds good. This is a linear response.
We reach a point however where if we make the stereo loud enough, the music becomes all distorted and we begin to hear new sounds that were not recorded on our CD! This is a non-linear response. The key again to understanding when something is non-linear is that the output contains things that were not present in the input.
Conclusion
In this post, we looked at the basic differences between linear and non-linear systems, using everyday analogies to make the concepts clear.
About the author: Alan Friedman has more than 18 years of engineering experience and has worked with hundreds of industrial facilities worldwide to develop best practices for sustainable condition monitoring and predictive maintenance programs. He has contributed to the development of automated diagnostic systems and produced and taught global CAT II and CAT III equivalent vibration analysis courses.