By Alan Friedman
This is Part 2 of our three-part series on linear and non-linear systems in machinery. If you missed Part 1, we introduced the basics of proportionality, superposition, and non-linear responses using simple analogies. In this post, we’ll take those concepts into the world of vibration spectra.
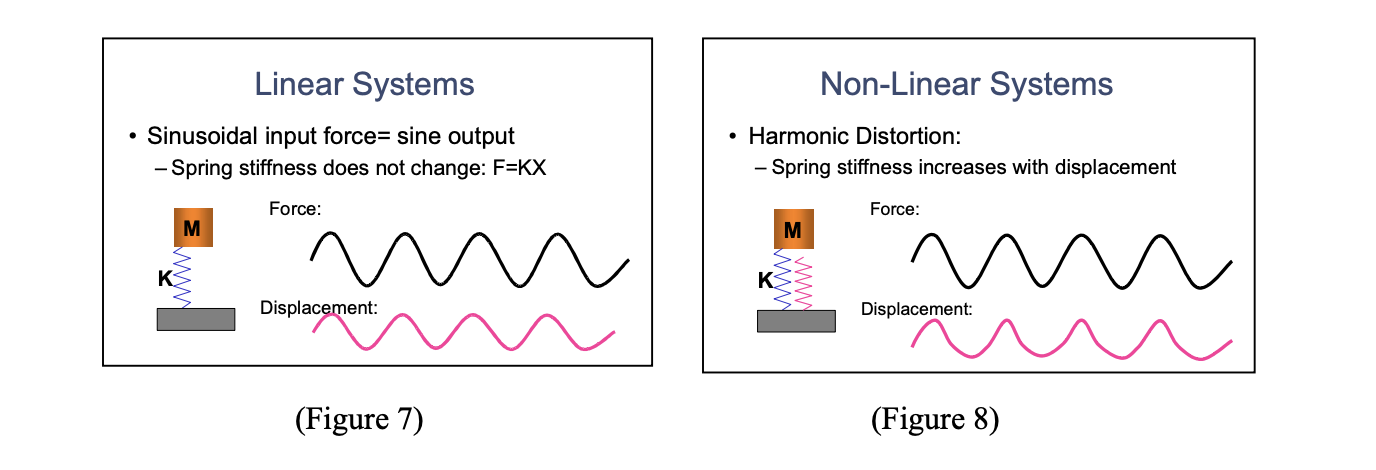
Now that we have described the basic concepts of linearity and non-linearity, it is time to discuss them in terms of vibration signals. Simple mass-spring systems as shown in figures 7 and 8 will be used for this discussion.
In figure 7, we have an ideal mass / spring system that can be described by the equation F = KX where “F” is the input force, “K” is the spring stiffness and “X” is the resulting displacement of the spring. This is a linear system. If we input a sinusoidal force, the resulting displacement is also sinusoidal and proportional to the input.
In Figure 8, the stiffness of the spring changes as it is stretched and compressed. This is a non-linear system. When we input a sinusoidal force, the resulting displacement is not sinusoidal. This again obeys the rules of nonlinear systems in that we get out something that looks different from what we put in.
If we remember our basic rules of vibration and the Fast Fourier Transform, the displacement sine wave in figure 7 will produce a single peak in a vibration spectrum. The displacement wave in Figure 8 will produce a peak in the spectrum with harmonics (multiples). This brings us to another important point. The harmonics in this case, are the result of non–linearity.
Machinery Vibration
When we look at the vibration spectra for a machine in the context of linear and nonlinear systems, we can make a very general statement that as machines deteriorate and develop faults they become less linear in their responses. We can also say that many machine faults create non-linearity. Therefore, also in very general terms, we can expect the spectra from a healthy machine to be relatively simple compared to the spectra from a machine with faults.
If we consider mechanical looseness as a common machine problem, we can demonstrate this. When the machine is not experiencing looseness and is in good health, its spectra may look like Figure 9.
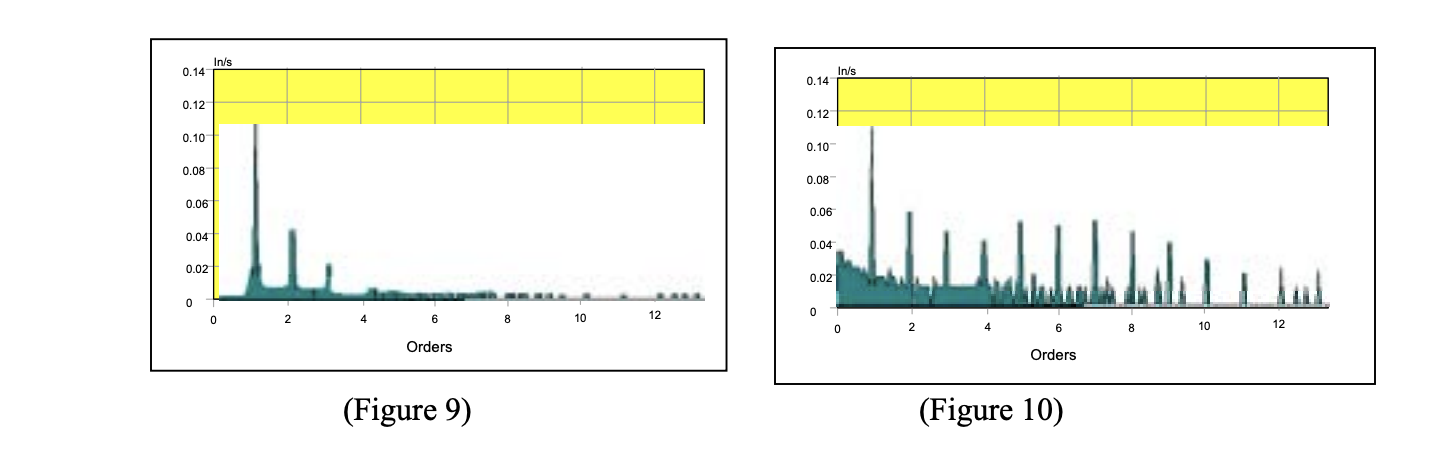
In this figure (9), we can see the shaft rate peak (the big one on the left) and a couple of harmonics of the shaft speed. Figure 10 is data from the same machine when it has a looseness problem. What we can see in Figure 10 is that the shaft rate harmonics are both more numerous and higher in amplitude. This is very similar to the example of the two mass-spring systems in that when the mass-spring system was linear, only 1 peak was produced in the spectrum i.e. the output looked like the input. When the mass spring system was non-linear, the output waveform was not sinusoidal and therefore produced harmonics in the spectrum.
If we take a step back, we can consider that the mechanical input forces in a simple rotating machine are coming from the rotating shaft. If the shaft is rotating perfectly (i.e. there is no looseness) and the response of the machine structure is perfectly linear then we would expect to see only a single peak in our spectrum corresponding to the shaft rate. In other words, the output would look like the input. No machines are perfect however, and shafts do not typically rotate perfectly around their centers and this is why we expect to see some harmonics in machine spectra (as in Figure 9). However, as the machine becomes more nonlinear, due to looseness perhaps, we get more harmonics with higher amplitudes (as in Figure 10).
Note that if one views a spectrum with a linear amplitude scale, one may not see the harmonic content of the spectrum if the harmonics are much smaller in amplitude than the shaft rate peak. If one views the same data, using a logarithmic amplitude scale, more harmonic content will be visible on the graph.
Looseness, Foundation Cracks and Broken Mounting Bolts can cause non- linearity in machines that may result in harmonics in a spectrum.
Conclusion
In this post, we saw how linearity (or lack of it) directly shapes vibration spectra — from simple, clean peaks to cluttered harmonics.
About the author: Alan Friedman has more than 18 years of engineering experience and has worked with hundreds of industrial facilities worldwide to develop best practices for sustainable condition monitoring and predictive maintenance programs. He has contributed to the development of automated diagnostic systems and produced and taught global CAT II and CAT III equivalent vibration analysis courses.